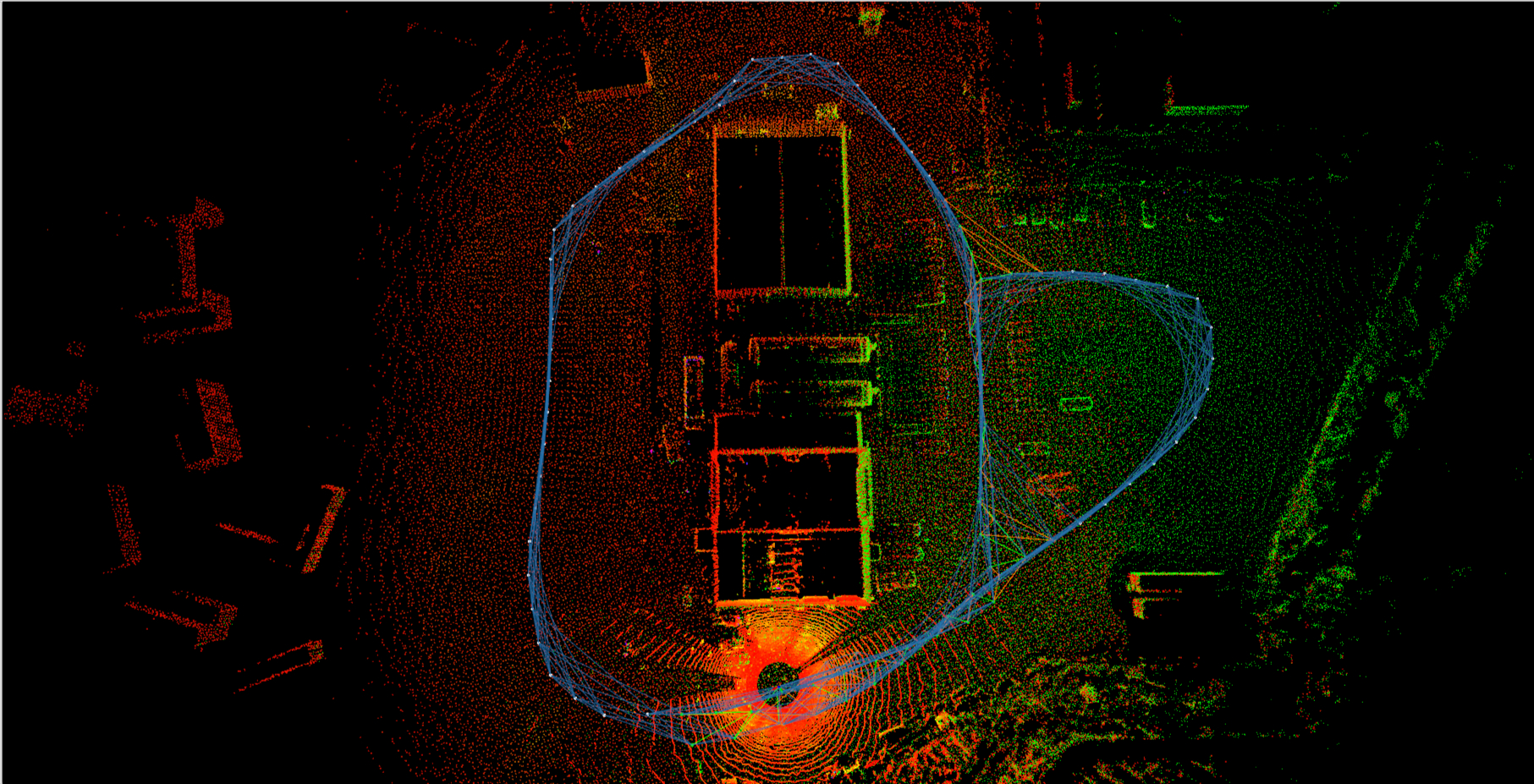
LiDAR SLAM at UCLA Botanical Gardens
Multi-Agent SLAM: LiDAR Place Recognition and Map Merging
Dynamic Change Detection during SLAM Mission
LiDAR SLAM at UCLA Botanical Gardens
Multi-Agent SLAM: LiDAR Place Recognition and Map Merging
Dynamic Change Detection during SLAM Mission
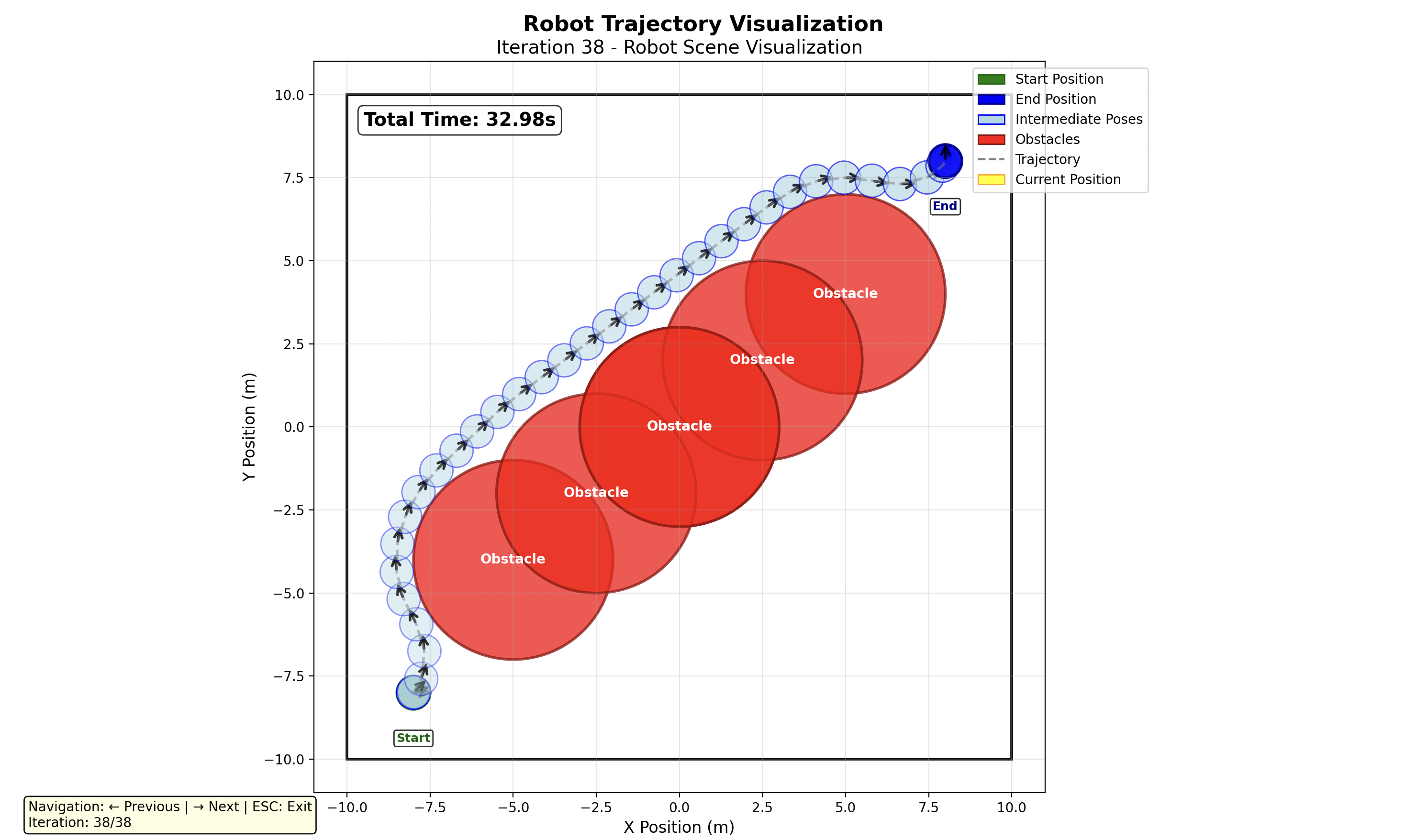
Successive Convexification for Non-linear dynamics and Non-convex obstacles

Robosub 2024 (technical report)
Bioinspired Tendon-Driven Robotic Eyes track faces (2023)
Read my paper here.
URe5 solves Tower of Hanoi using Symbolic Planner (2022)
Autonomous Cone Stacking
Quicker Autonomous Cone Stacking
Autonomous Navigation
Autonomous collection and deposition
Tossing Disks